Полезное
Мы Вконтакте
Discord канал

Эта страница список параметров физических соединений (Physics Constraints).
| Свойство | Описание |
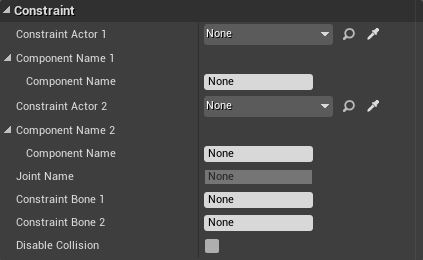
| Constraint Actor 1 | Указатель на первый объект. |
| Component Name 1 | Имя первого компонента для взаимодействия. Если в Constraint Actor 1 ничего не указано, то будет выбираться компонент в пределах текущего объекта. Если здесь ничего не указано, то будет использоваться корневой компонент из текущего объекта. |
| Constraint Actor 2 | Указатель на второй объект. |
| Component Name 2 | Имя второго компонента для взаимодействия. Если в Constraint Actor 2 ничего не указано, то будет выбираться компонент в пределах текущего объекта. Если здесь ничего не указано, то будет использоваться корневой компонент из текущего объекта. |
| Joint Name | Название кости с которой связано это соединение. |
| Constraint Bone 1 | Название первой кости (тела), для взаимодействия. Это будет дочерняя кость в PhysicsAsset. |
| Constraint Bone 2 | Название второй кости (тела), для взаимодействия. Это будет дочерняя кость в PhysicsAsset. |
| Disable Collision | Отключить взаимодействие. |
| Свойство | Описание |
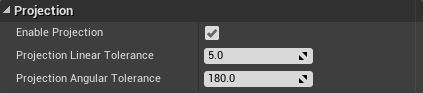
| Enable Projection | Если ошибки расстояния между телами превышают 0,1 единиц, или ошибка вращения превышает 10 градусов, тело будет проецироваться, чтобы исправить это. Например, соединение слишком быстро будет двигаться и элементы покажутся отделенными друг от друга из-за скорости, эта настройка позволит проецировать все тела так, что они по-прежнему будут выглядеть связанными. |
| Projection Linear Tolerance | Допустимый лимит ошибок положения. |
| Projection Angular Tolerance | Допустимый лимит ошибок вращения. |

| Свойство | Описание |
| Hinge | Пресет шарнира. Шарнир допускает движение только в одной плоскости. |
| Prismatic | Пресет призмообразного соединения. Призмообразное соединение позволяет только линейные скользящие движения. |
| Ball and Socket | Пресет шарового соединения. Мяч и шарнир допускают движение вокруг неопределенного числа осей, которые имеют один общий центр. |
| Свойство | Описание |
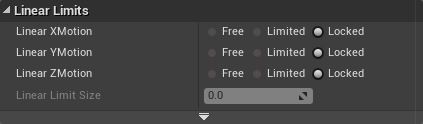
| Linear XMotion | Указывает, разрешено ли линейное движение вдоль оси X, заблокировано или ограничено. Если движение ограничено, свойство LinearLimit будет определять диапазон границ. |
| Linear YMotion | Указывает, разрешено ли линейное движение вдоль оси Y, заблокировано или ограничено. Если движение ограничено, свойство LinearLimit будет определять диапазон границ. |
| Linear ZMotion | Указывает, разрешено ли линейное движение вдоль оси Z, заблокировано или ограничено. Если движение ограничено, свойство LinearLimit будет определять диапазон границ. |
| Linear Limit Size | Предельная степень, в мировых единицах, линейного движения для ограниченных осей движения. |
| Свойство | Описание |
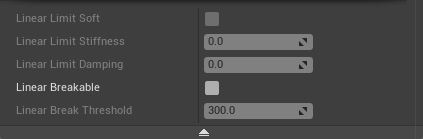
| Linear Limit Soft | Хотим ли мы использовать мягкие ограничения вместо жестких. |
| Linear Limit Stiffness | Жесткость предела мягких ограничений. Используется только, когда Linear Limit Soft включено. |
| Linear Limit Damping | Затухание предела мягких ограничений. Используется только, когда Linear Limit Soft включено. |
| Linear Breakable | Определяет может ли сустав сломаться или нет. |
| Linear Break Threshold | Усилие, необходимое, чтобы разорвать соединение. |
| Свойство | Описание |
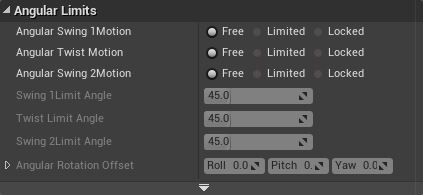
| Angular Swing 1Motion | Указывает, разрешено ли вращение вокруг оси Z, заблокировано или ограничено. Если ограничено, свойство AngularLimit будет использоваться для определения диапазона движения. |
| Angular Twist Motion | Указывает, разрешено ли вращение вокруг оси X, заблокировано или ограничено. Если ограничено, свойство AngularLimit будет использоваться для определения диапазона движения. |
| Angular Swing 2Motion | Указывает, разрешено ли вращение вокруг оси Y, заблокировано или ограничено. Если ограничено, свойство AngularLimit будет использоваться для определения диапазона движения. |
| Swing 1Limit Angle | Используется, если поворотное движение вдоль оси Y ограничено. Предельный угол задается в градусах и должен находиться в диапазоне от 0 до 180. |
| Twist Limit Angle | Используется, если поворотное движение вдоль оси X ограничено. Предельный угол задается в градусах и должен находиться в диапазоне от 0 до 180. |
| Swing 2Limit Angle | Используется, если поворотное движение вдоль оси Z ограничено. Предельный угол задается в градусах и должен находиться в диапазоне от 0 до 180. |
| Angular Rotation Offset | Задает угловое смещение между двумя системами отсчета. По умолчанию предел идет от (-угол, + угол). Это позволяет смещать предел для swing1, swing2 и twist. |
| Свойство | Описание |
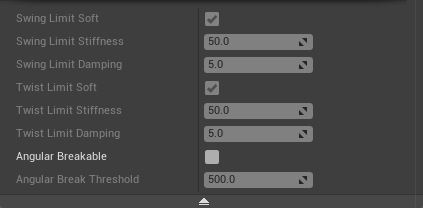
| Swing Limit Soft | Если мы хотим использовать мягкие ограничения для распашных движений вместо жестких ограничений. |
| Swing Limit Stiffness | Жесткость предела распашных ограничений, если Swing Limit Soft включено. |
| Swing Limit Damping | Затухание предела распашных ограничений, если Swing Limit Soft включено. |
| Twist Limit Soft | Если мы хотим использовать мягкие ограничения для вращательных движений вместо жестких ограничений. |
| Twist Limit Stiffness | Жесткость предела вращательных ограничений, если Twist Limit Soft включено. |
| Twist Limit Damping | Затухание предела вращательных ограничений, если Twist Limit Soft включено. |
| Angular Breakable | Можно ли разорвать соединение. |
| Angular Break Threshold | Угловое усилие, которое необходимо, чтобы разорвать соединение. |
| Свойство | Описание |
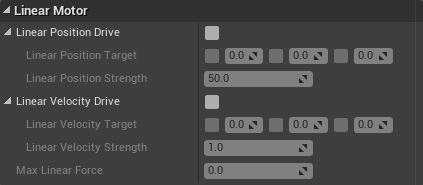
| Linear Position Drive | Включение / выключение привода положения. |
| Linear Position Target | Конечное положение линейного привода. Показаны только компоненты, которые разрешены к использованию. |
| Linear Position Strength | Сила линейного привода. |
| Linear Velocity Drive | Включение / выключение линейного привода скорости. |
| Linear Velocity Target | Целевая скорость линейного привода. |
| Linear Velocity Strength | Сила линейного привода. |
| Max Linear Force | Ограничение по силе которую может применять линейный привод. |
| Свойство | Описание |
| Angular Orientation Drive | Включает / выключает привод ориентации. |
| Angular Orientation Target | Целевая ориентация для углового привода. |
| Angular Orientation Strength | Сила углового привода. |
| Angular Velocity Drive | Включение / выключение углового привода скорости. |
| Angular Velocity Target | Целевая скорость углового привода скорости. |
| Angular Velocity Strength | Сила углового привода скорости. |
| Max Angular Force | Ограничение по силе которую может применять угловой привод скорости. |
| Angular Drive Mode | Тип углового привода. |